 Datasets
Datasets
 Models
Models
147 lines (111 with data), 13.4 kB
PoseC3D
Abstract
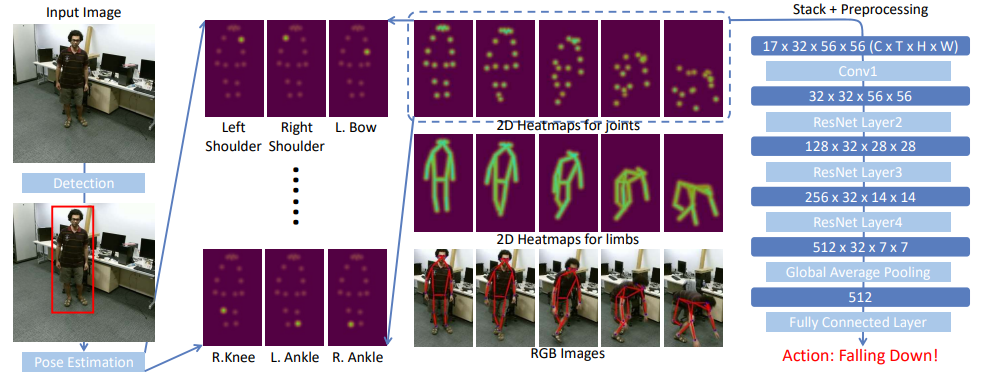
Human skeleton, as a compact representation of human action, has received increasing attention in recent years. Many skeleton-based action recognition methods adopt graph convolutional networks (GCN) to extract features on top of human skeletons. Despite the positive results shown in previous works, GCN-based methods are subject to limitations in robustness, interoperability, and scalability. In this work, we propose PoseC3D, a new approach to skeleton-based action recognition, which relies on a 3D heatmap stack instead of a graph sequence as the base representation of human skeletons. Compared to GCN-based methods, PoseC3D is more effective in learning spatiotemporal features, more robust against pose estimation noises, and generalizes better in cross-dataset settings. Also, PoseC3D can handle multiple-person scenarios without additional computation cost, and its features can be easily integrated with other modalities at early fusion stages, which provides a great design space to further boost the performance. On four challenging datasets, PoseC3D consistently obtains superior performance, when used alone on skeletons and in combination with the RGB modality.
Citation
@misc{duan2021revisiting,
title={Revisiting Skeleton-based Action Recognition},
author={Haodong Duan and Yue Zhao and Kai Chen and Dian Shao and Dahua Lin and Bo Dai},
year={2021},
eprint={2104.13586},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
|
Pose Estimation Results


|
Keypoint Heatmap Volume Visualization


|
Limb Heatmap Volume Visualization


|
Model Zoo
FineGYM
| config | pseudo heatmap | gpus | backbone | Mean Top-1 | ckpt | log | json |
|---|---|---|---|---|---|---|---|
| slowonly_r50_u48_240e_gym_keypoint | keypoint | 8 x 2 | SlowOnly-R50 | 93.7 | ckpt | log | json |
| slowonly_r50_u48_240e_gym_limb | limb | 8 x 2 | SlowOnly-R50 | 94.0 | ckpt | log | json |
| Fusion | 94.3 |
NTU60_XSub
| config | pseudo heatmap | gpus | backbone | Top-1 | ckpt | log | json |
|---|---|---|---|---|---|---|---|
| slowonly_r50_u48_240e_ntu60_xsub_keypoint | keypoint | 8 x 2 | SlowOnly-R50 | 93.7 | ckpt | log | json |
| slowonly_r50_u48_240e_ntu60_xsub_limb | limb | 8 x 2 | SlowOnly-R50 | 93.4 | ckpt | log | json |
| Fusion | 94.1 |
NTU120_XSub
| config | pseudo heatmap | gpus | backbone | Top-1 | ckpt | log | json |
|---|---|---|---|---|---|---|---|
| slowonly_r50_u48_240e_ntu120_xsub_keypoint | keypoint | 8 x 2 | SlowOnly-R50 | 86.3 | ckpt | log | json |
| slowonly_r50_u48_240e_ntu120_xsub_limb | limb | 8 x 2 | SlowOnly-R50 | 85.7 | ckpt | log | json |
| Fusion | 86.9 |
UCF101
| config | pseudo heatmap | gpus | backbone | Top-1 | ckpt | log | json |
|---|---|---|---|---|---|---|---|
| slowonly_kinetics400_pretrained_r50_u48_120e_ucf101_split1_keypoint | keypoint | 8 | SlowOnly-R50 | 87.0 | ckpt | log | json |
HMDB51
| config | pseudo heatmap | gpus | backbone | Top-1 | ckpt | log | json |
|---|---|---|---|---|---|---|---|
| slowonly_kinetics400_pretrained_r50_u48_120e_hmdb51_split1_keypoint | keypoint | 8 | SlowOnly-R50 | 69.3 | ckpt | log | json |
:::{note}
- The gpus indicates the number of gpu we used to get the checkpoint. It is noteworthy that the configs we provide are used for 8 gpus as default.
According to the Linear Scaling Rule, you may set the learning rate proportional to the batch size if you use different GPUs or videos per GPU,
e.g., lr=0.01 for 8 GPUs x 8 videos/gpu and lr=0.04 for 16 GPUs x 16 videos/gpu. - You can follow the guide in Preparing Skeleton Dataset to obtain skeleton annotations used in the above configs.
:::
Train
You can use the following command to train a model.
python tools/train.py ${CONFIG_FILE} [optional arguments]
Example: train PoseC3D model on FineGYM dataset in a deterministic option with periodic validation.
python tools/train.py configs/skeleton/posec3d/slowonly_r50_u48_240e_gym_keypoint.py \
--work-dir work_dirs/slowonly_r50_u48_240e_gym_keypoint \
--validate --seed 0 --deterministic
For training with your custom dataset, you can refer to Custom Dataset Training.
For more details, you can refer to Training setting part in getting_started.
Test
You can use the following command to test a model.
python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [optional arguments]
Example: test PoseC3D model on FineGYM dataset and dump the result to a pickle file.
python tools/test.py configs/skeleton/posec3d/slowonly_r50_u48_240e_gym_keypoint.py \
checkpoints/SOME_CHECKPOINT.pth --eval top_k_accuracy mean_class_accuracy \
--out result.pkl
For more details, you can refer to Test a dataset part in getting_started.